+998 947 207226
Payvandlash robotlari
CRP sanoat robotlari turli xil payvandlash jarayonlarida keng qo'llaniladi: MIG/MAG, TIG, qarshilik payvandlash, suv ostida payvandlash.
Samarali payvandlash ishlarini ta'minlash uchun, kompaniyamiz, jahonga mashhur ishlab chiqaruvchilarning ishonchli inverter manbalari bilan, CRP payvandlash robotlarini to'ldiradi.
Samarali payvandlash ishlarini ta'minlash uchun, kompaniyamiz, jahonga mashhur ishlab chiqaruvchilarning ishonchli inverter manbalari bilan, CRP payvandlash robotlarini to'ldiradi.
MIG/MAG payvandlash
TIG payvandlash
Payvandlash uchun robot-manipulyatorlar qanday ishlaydi
Har bir CRP payvandlash robotining boshqaruv tizimi, ixtisoslashtirilgan dasturiy ta'minot to'plami bilan jihozlangan
Analog/Raqamli boshqaruv
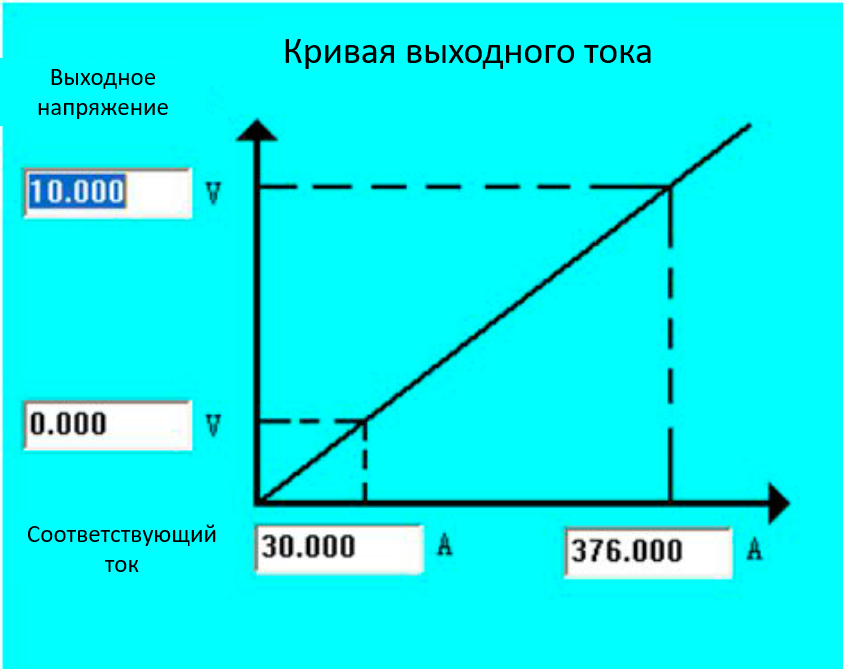
Analog boshqaruv: payvandlash mashinasining boshqaruv tizimi sizga yoyni yoqish, oqim, kuchlanish, gaz ta'minotini sozlash imkonini beradi.
Ushbu protokol, analog signallar orqali tashqi boshqarish uchun mo'ljallangan, payvandlash mashinalarining ko'pgina analog interfeyslariga mos keladi.
Ushbu protokol, analog signallar orqali tashqi boshqarish uchun mo'ljallangan, payvandlash mashinalarining ko'pgina analog interfeyslariga mos keladi.
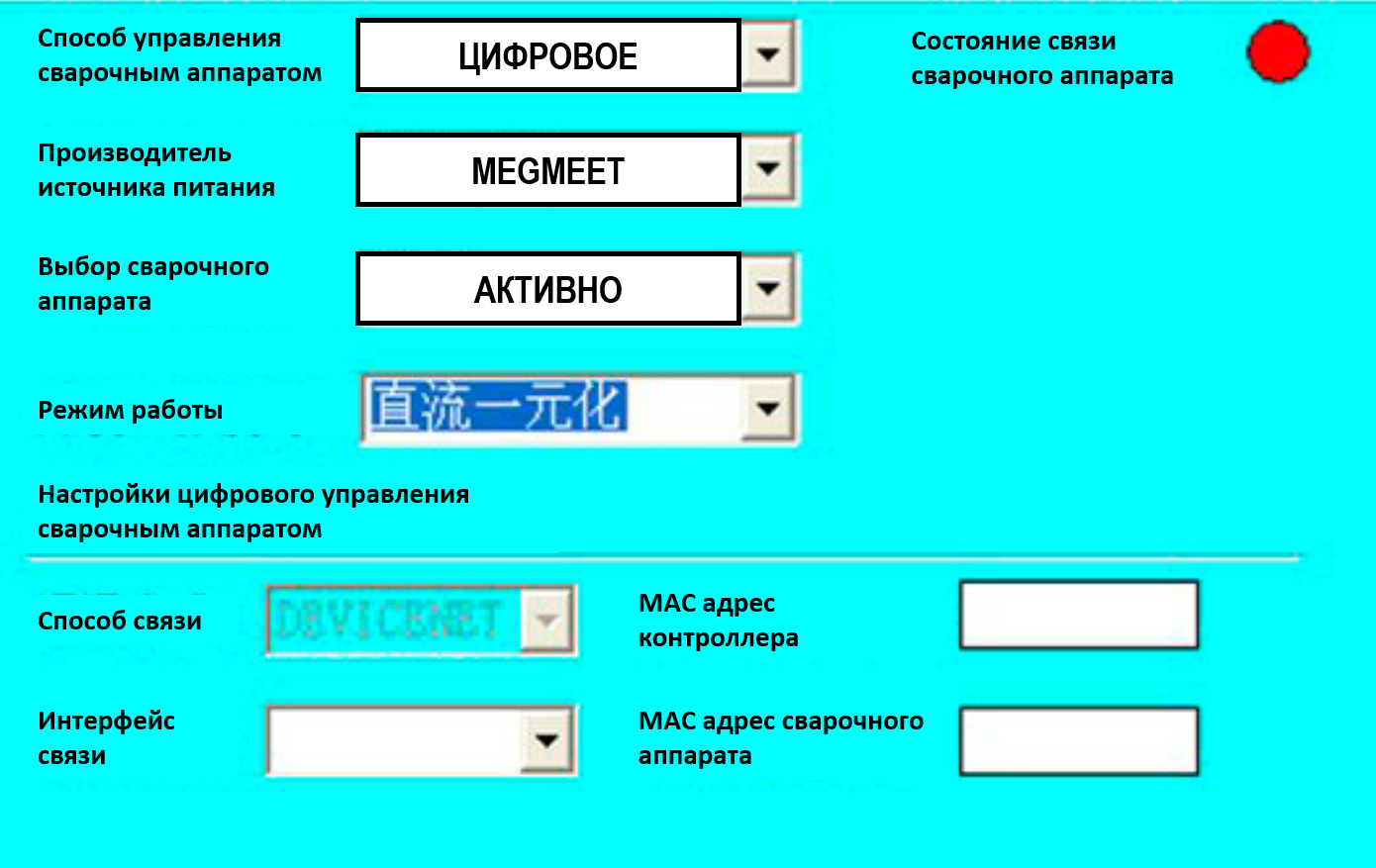
Raqamli boshqaruv: boshqaruv tizimi toki, kuchlanish, sim, gaz ta'minoti, yoyni yoqish parametrlarini, kraterni payvandlash boshqaruvi, qayta aloqa halqasi yordamida, payvandlangan bo'g'inni qidirish. Oddiy ulanish va shovqinlarga chidamlilik. Raqamli interfeys MEGMEET/AOTAI, kompaniyalarining payvandlash uskunalarini boshqarish uchun javob beradi.
Payvandlash tezligi va tezlikni sozlash
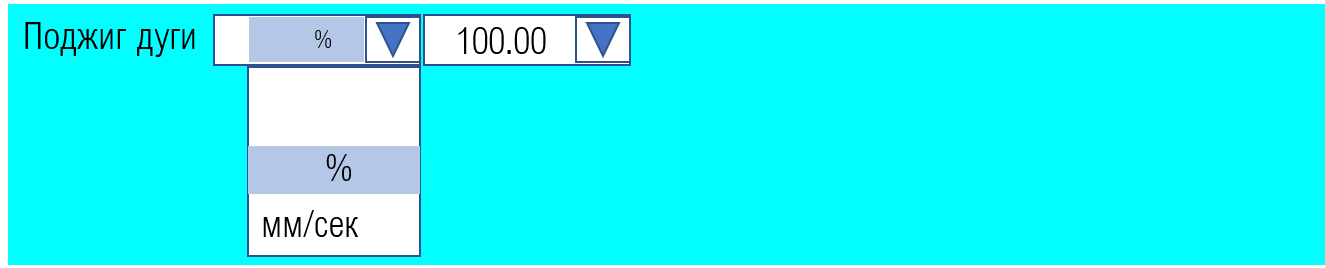
Payvandlash tezligi: Robot harakati bo'yicha yo'riqnomada payvandlash jarayonida chiziqli tezlikni (mm/s) yoki harakatlanish paytida nominal tezlikni (%) tanlash orqali harakat tezligini o'rnating.
Gaz ta'minotini boshqarish
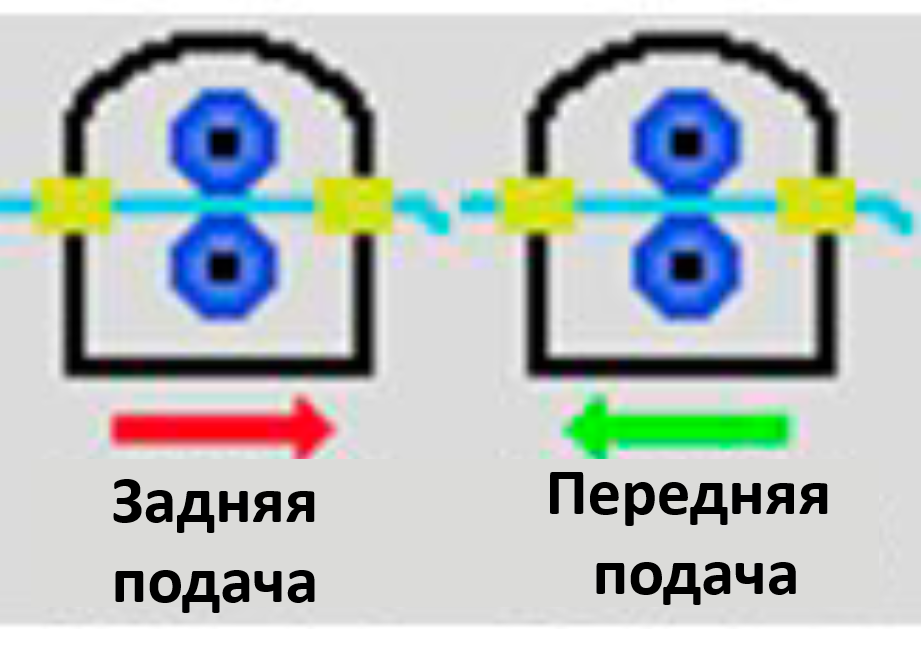
Robot interfeysida sim o'tkazish va dasturlash oson bo'lishi uchun qo'lda sim o'tkazish tugmalari mavjud.
Gaz ta'minoti

Robotning masofadan boshqarish pultida gaz ta'minoti tugmasi mavjud, bu uni osongina boshqarish imkonini beradi.
Gaz berishni tartibga solish
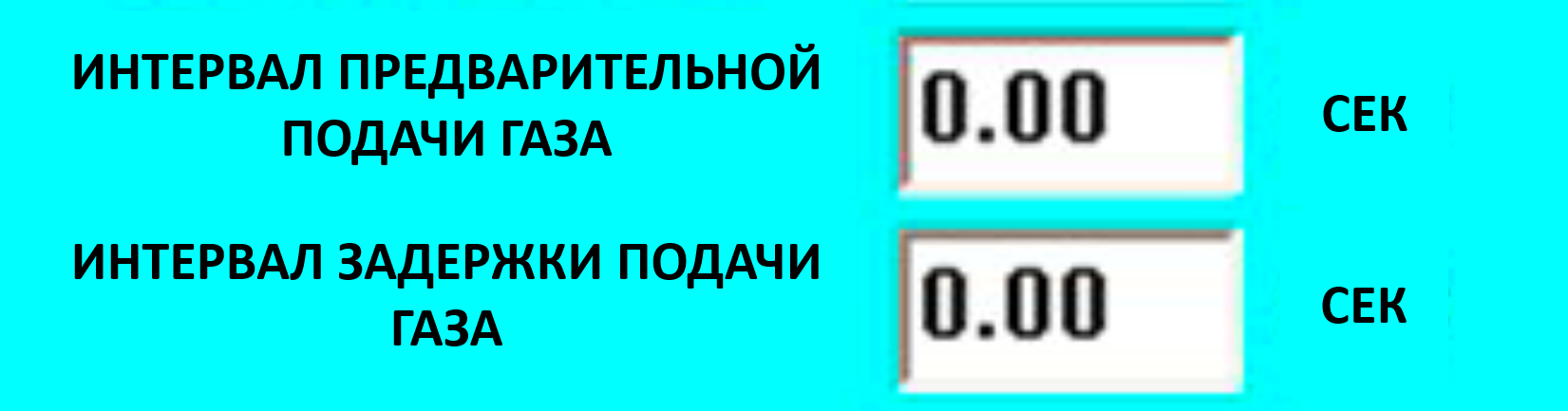
Intervallar yordamida gaz ta'minotini tartibga solish sizni:
payvandlash jarayonidan oldin dastlabki gaz ta'minotini davomiy tarzda etkazib berishni ta'minlaydi. Payvandlash boshlanishidan oldin, gaz ta'minoti, yoyning boshlanishini osonlashtiradi va chayqalishni kamaytiradi. Keyinchalik gaz ta'minoti payvandlash havzasini sovutish paytida, himoya qilishga imkon beradi.
payvandlash jarayonidan oldin dastlabki gaz ta'minotini davomiy tarzda etkazib berishni ta'minlaydi. Payvandlash boshlanishidan oldin, gaz ta'minoti, yoyning boshlanishini osonlashtiradi va chayqalishni kamaytiradi. Keyinchalik gaz ta'minoti payvandlash havzasini sovutish paytida, himoya qilishga imkon beradi.
Payvandlash simulyatsiyasi rejimi

O'quv panelida dasturni tekshirish yoki tanlangan tikuvlarni payvandlash uchun ishlatilishi mumkin bo'lgan payvandni boshlash tugmasi mavjud. Harakat faollashgandan so‘ng, haqiqiy payvandlash traektoriyasiga muvofiq amalga oshiriladi, biroq dog‘ yoqilmaydi, suv va himoya gazi berilmaydi.
Payvandlash yoyi nazorati
Payvandlash jarayonida yoy uzilib qolsa, tizim robotni to'xtatib, xato signalini beradi.
Yoyning uzilish nuqtasini saqlash
Agar payvandlash jarayonida yoy uzilib qolsa, robot ushbu nuqtani eslab qoladi, operator tomonidan sinish sabablarini tekshirgandan va ularni yo'q qilgandan so'ng, robot dasturni xuddi shu qatordan boshlaydi va payvandlash jarayonini o'sha joydan davom ettiradi. Yoy sindirish nuqtasi dastur qayta o'rnatilgandan yoki payvandlash jarayoni qayta boshlanganidan keyin o'chirib tashlanadi.
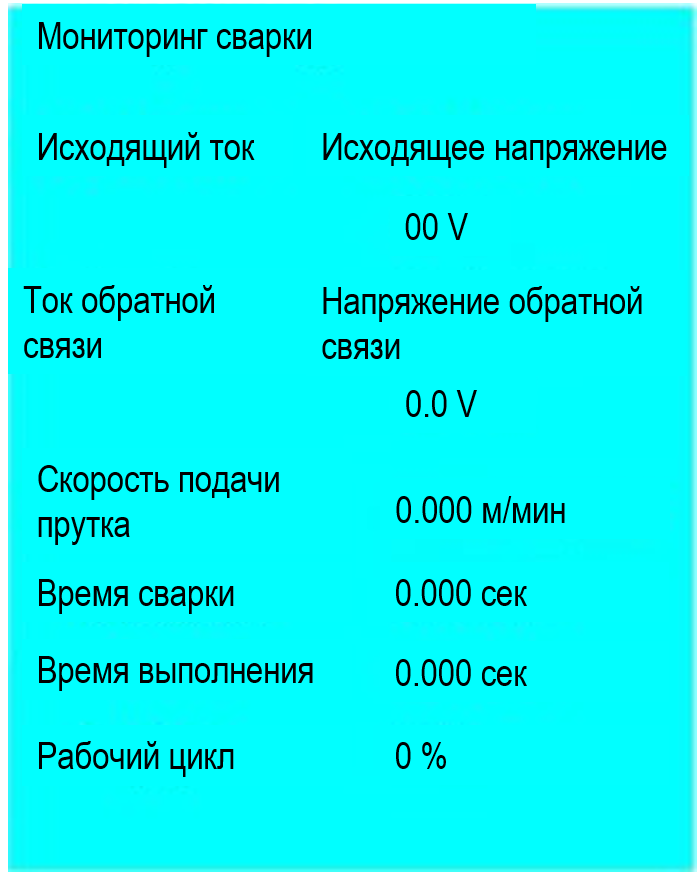
Payvandlash jarayonini kuzatish
Haqiqiy vaqtda monitor ko'rsatishi mumkin: oqim, kuchlanish, payvandlash vaqti, dasturni bajarish vaqti.
Bu dasturni tahlil qilish va optimallashtirish uchun foydalidir.
Bu dasturni tahlil qilish va optimallashtirish uchun foydalidir.
To'qnashuvga qarshi mash'al funktsiyasi
CRP ishi payvandlash mash'alasini armatura qismlari va elementlari bilan to'qnashuvlardan himoya qilish funktsiyasi bilan jihozlangan. Bu uning yaxlitligi va geometriyasini saqlashga yordam beradi va manipulyatorning o'ziga zarar etkazilishining oldini oladi. Ushbu funktsiyani amalga oshirish uchun payvandlash mash'alasi bloki harakatlanuvchi menteşe va uning holatidagi sensorlar bilan jihozlangan. Menteşe normal holatdan chetga chiqqanda, tegishli dasturiy signal yo'qoladi, bu esa robotning to'xtashiga olib keladi. Ushbu funktsiya Burner va robotni shikastlanishdan ishonchli himoya qilishga imkon beradi.
Optik kuzatuv sensori orqali ish qismini qidirish
Optik tikuvni kuzatish sensori yordamida payvandlangan birikmani qidirish mumkin. Qidiruv, ulanishning hozirgi holatini skanerlaydigan lazer nurlari yordamida aniqlashga yordam beradi. Robot joriy pozitsiyani mos yozuvlar tikuvining qayd etilgan pozitsiyasi bilan solishtiradi.Joylashuv og'ishlari aniqlanganda, robot payvandlash yo'lini tegishli tarzda tuzatadi.
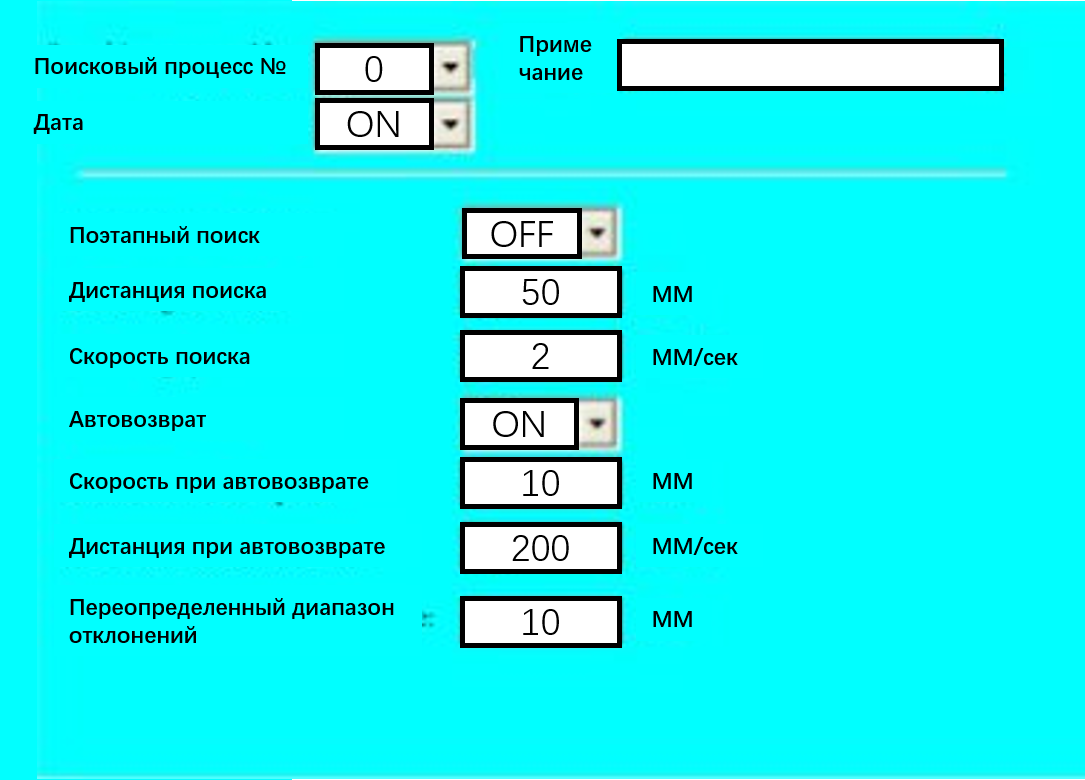
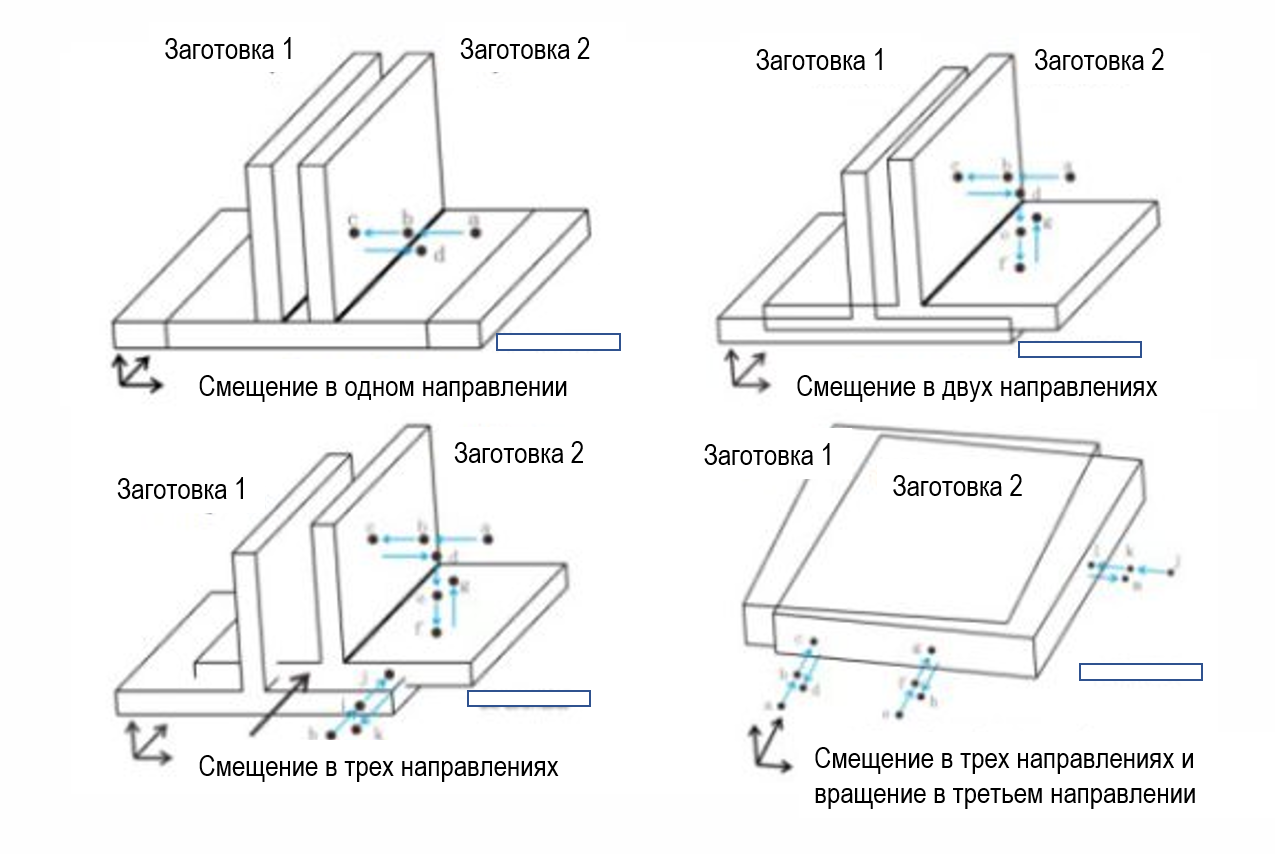
Sensorli qidiruv (integral qidiruv)
Ishlov beriladigan qismning holatini sensor orqali qidirish, asbob sifatida payvandlash pallasidan foydalangan holda amalga oshiriladi. Robotda ushbu kontaktlarning zanglashiga olib kelganini bildiradigan tegishli raqamli signal mavjud. Payvandlash mashinasi payvandlash mash'alining ijobiy elektrodiga (simga) kuchlanish beradi. Payvandlash simini ishlov beriladigan qismga (salbiy elektrod) tegizish paytida robot tegishli signalni oladi.
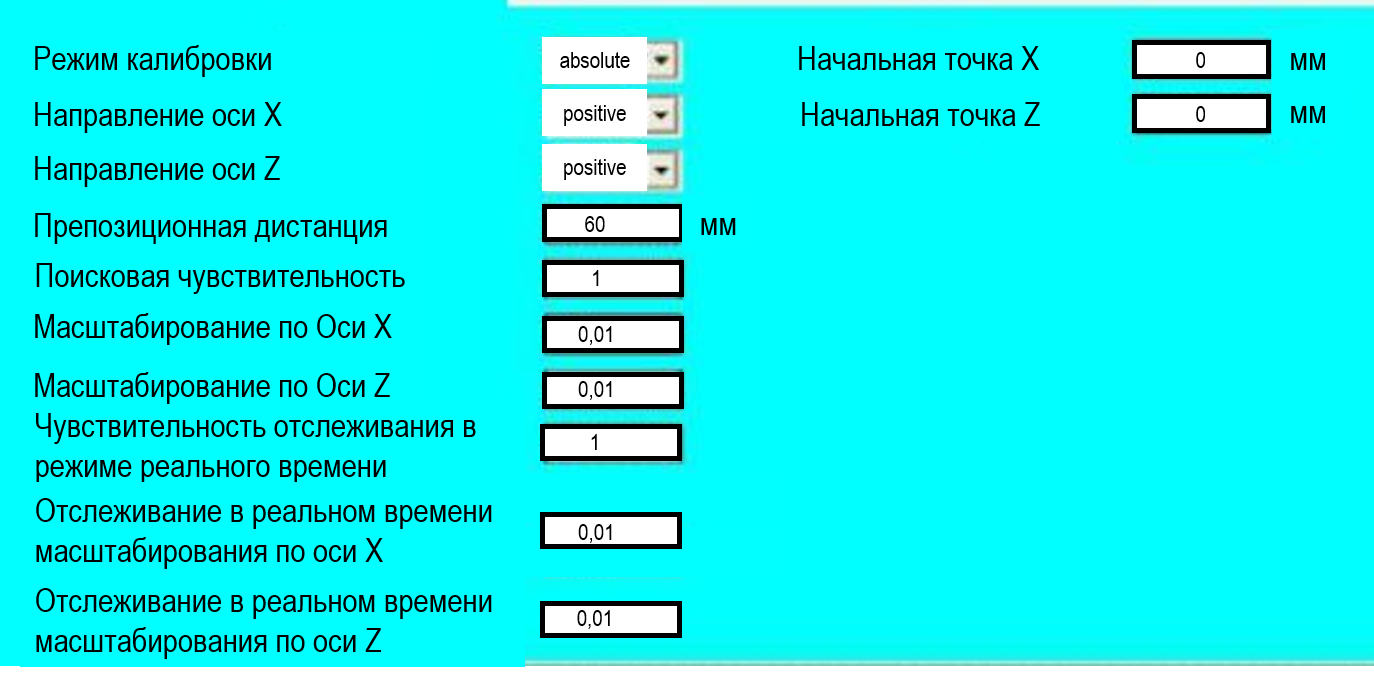
Amalda qidiruv jarayoni quyidagicha amalga oshiriladi. Birinchidan, bu funksiya mos yozuvlar mahsulotida kalibrlash orqali o'rnatiladi. Robot qismni his qiladi va unga tegsa, uning mos yozuvlar nuqtalarining holatini qayd etadi (mos yozuvlar qismi bir marta o'rnatiladi). Keyinchalik, keyingi blankalar o'rnatiladi, ularning har birini payvandlash jarayonidan oldin, qo'llash nuqtalarining joriy koordinatlari qayd etiladi. Keyinchalik, joriy pozitsiyalar mos yozuvlar bilan taqqoslanadi, koordinatalardagi farq hisoblab chiqiladi va tegishli siljish boshqaruv dasturiga kiritiladi. Joylarni tuzatish bitta va bir nechta tekislikda (1D, 2D, 3D, 2D +, 3D +) amalga oshirilishi mumkin.
Amalda qidiruv jarayoni quyidagicha amalga oshiriladi. Birinchidan, bu funksiya mos yozuvlar mahsulotida kalibrlash orqali o'rnatiladi. Robot qismni his qiladi va unga tegsa, uning mos yozuvlar nuqtalarining holatini qayd etadi (mos yozuvlar qismi bir marta o'rnatiladi). Keyinchalik, keyingi blankalar o'rnatiladi, ularning har birini payvandlash jarayonidan oldin, qo'llash nuqtalarining joriy koordinatlari qayd etiladi. Keyinchalik, joriy pozitsiyalar mos yozuvlar bilan taqqoslanadi, koordinatalardagi farq hisoblab chiqiladi va tegishli siljish boshqaruv dasturiga kiritiladi. Joylarni tuzatish bitta va bir nechta tekislikda (1D, 2D, 3D, 2D +, 3D +) amalga oshirilishi mumkin.
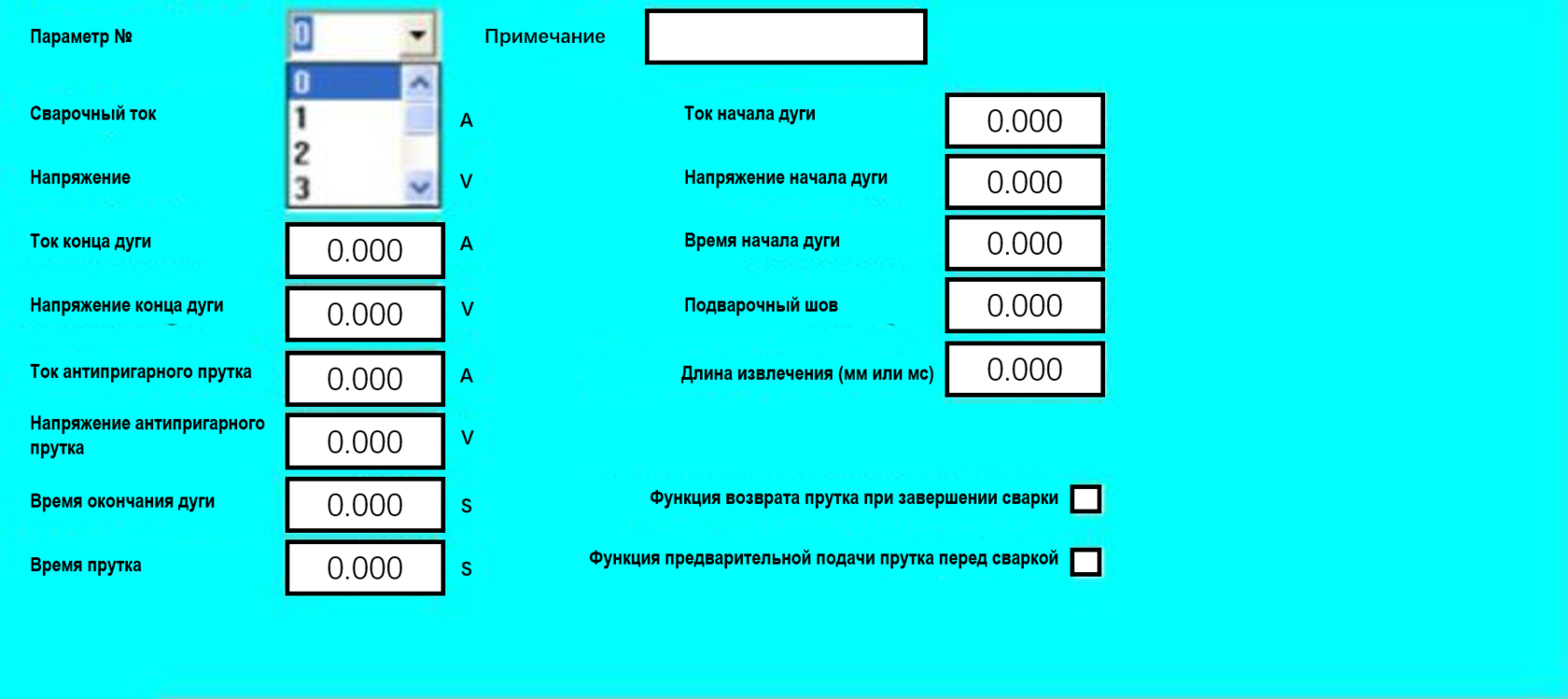
Payvandlash rejimlari
Payvandlash bilan bog'liq parametrlarni oson sozlash: payvandlash oqimi va kuchlanishi, yoyni yoqish va kraterni payvandlash oqimi va kuchlanishi, gazni oldindan tozalash vaqti va payvandlash oxirida gazni tozalash vaqti payvandlash jadvallari yordamida belgilanadi.
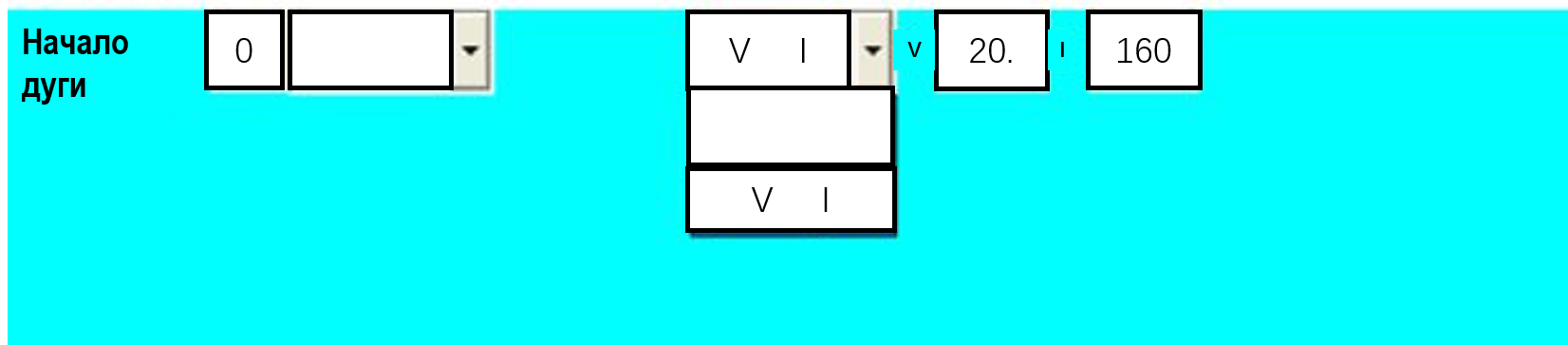
Гибкая система изменения параметров сварки
Payvandlash bo'yicha ko'rsatmalar to'g'ridan-to'g'ri payvandlash dasturida payvandlash oqimi va kuchlanishni sozlashni qo'llab-quvvatlaydi. Bu to'g'ridan-to'g'ri dasturlarni yozish jarayonida payvandlash parametrlarini qulay tarzda sozlash imkonini beradi.
Simni qaytarish funksiyasi
Ushbu funktsiya yoqilganda, payvandlash choklari (bo'sh harakatlar) o'rtasida harakatlanayotganda, robot avtomatik ravishda payvandlash simining chiqishini kamaytiradi. Bu simning qismlar va armatura bilan to'qnashishi ehtimolini oldini olish uchun sodir bo'ladi, bu esa qismlarning siljishini oldini oladi va sim uchining egilishini oldini oladi.

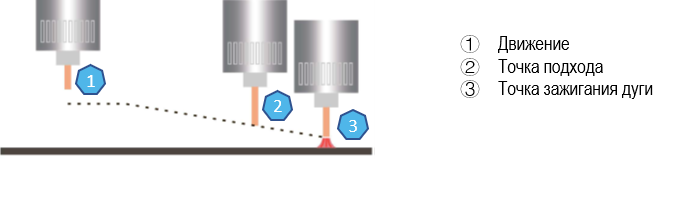
Issiq ishga tushirish funktsiyasi
(Simni oldindan o'rnatish)
(Simni oldindan o'rnatish)
Oddiy rejimda yoyni yoqish quyidagi tarzda amalga oshiriladi. Birinchidan, robot payvandlashning boshlang'ich nuqtasiga joylashtiriladi, so'ngra gazning oldindan oqimi va simni uzatish boshlanadi. Sim ishlov beriladigan qismga tegib turgan paytda yoy yonadi. Payvandlash paytida simning uzatilishi juda sekin bo'lganligi sababli, bizda robotning joylashishi va yoyning yonishi o'rtasida sezilarli vaqt pauzasi mavjud. Issiq ishga tushirish funksiyasi faol bo'lganda, robot payvandlash joyiga yaqinlashish nuqtasida, yoyni yoqish simini oldindan oziqlantirishni boshlaydi. Bu sizga payvandlashning boshlang'ich nuqtasida kontaktni deyarli bir zumda qilish va mahsulotni payvandlashning umumiy aylanish vaqtini sezilarli darajada kamaytirish imkonini beradi.
Qayta yondirish funktsiyasi
Ushbu funktsiya, agar biron sababga ko'ra o'chib ketgan bo'lsa, yoyni qayta yoqish uchun mo'ljallangan. Agar ushbu funktsiya faol bo'lsa, unda yoy uzilib qolganda, robot payvandlash yo'li bo'ylab bir oz orqaga qaytadi, yoyni qayta yoqadi va dasturni davom ettiradi.

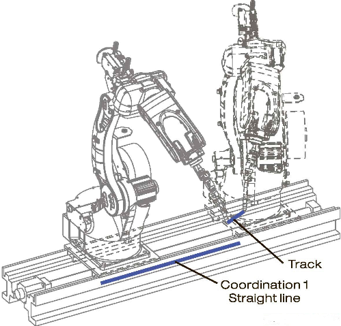
Chiziqli sinxronizatsiya (interpolatsiya)
Chiziqli sinxronizatsiya opsiyasi robotga tashqi chiziqli o'qlar bilan birgalikda sinxron (ketma-ket) harakatlarni amalga oshirishga imkon beradi, ularning yo'nalishi robotning mutlaq koordinatalar tizimining X, Y, Z o'qlari yo'nalishlariga to'g'ri kelishi kerak. Ushbu parametr, robotga ishlab chiqarish jarayonidan chiqmasdan, chiziqli harakatlarni amalga oshirishga imkon beradi. Bu, masalan, Mash'alni ajratmasdan, payvand chokining butun uzunligi bo'ylab murakkab geometriyaning cho'zilgan bo'g'inlarini payvandlash uchun trekdan foydalanishga imkon beradi.
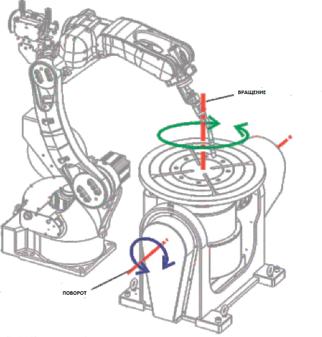
Doirali sinxronizatsiya (interpolatsiya)
Doirali sinxronlashtirish robotga o‘z harakatlarini tashqi qo‘shimcha aylanish o‘qlari harakatlari bilan muvofiqlashtirish imkonini beradi. Robot bir yoki undan ortiq aylanish oʻqlariga ega boʻlgan pozitsioner bilan hamkorlikda sinxron harakatlarni amalga oshirishga qodir. Bu robotga o'zi uchun eng qulay yondashuv nuqtasini va kosmosdagi payvandlangan bo'g'inning o'rnini tanlash imkoniyati bilan hatto juda katta qismlarni to'liq qamrab olishga imkon beradi. Ushbu texnologiya payvandlash jarayonida robotni qayta joylashtirmasdan murakkab geometriyaga ega bo'lgan mahsulotda uzluksiz tikuvni bajarish talab qilinadigan operatsiyalarni bajarishga imkon beradi.
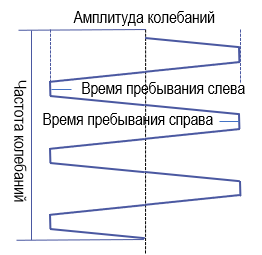
Z shaklidagi tebranishlar
Z shaklidagi tebranishlar: ushbu funktsiya yoqilganda, robotning payvandlash mash'alasi payvandlash jarayonida Z shaklidagi tebranishlarni amalga oshiradi. Tebranish yo'nalishi payvandlash mash'alining harakat yo'nalishiga perpendikulyar.
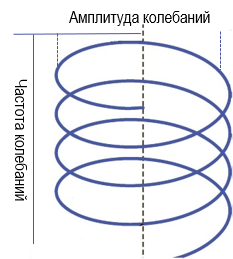
Halqali tebranishlar
Ark tebranishi: Agar ushbu funksiya yoqilgan bo'lsa, robot mash'alasi payvandlash jarayonida tebranadi. .
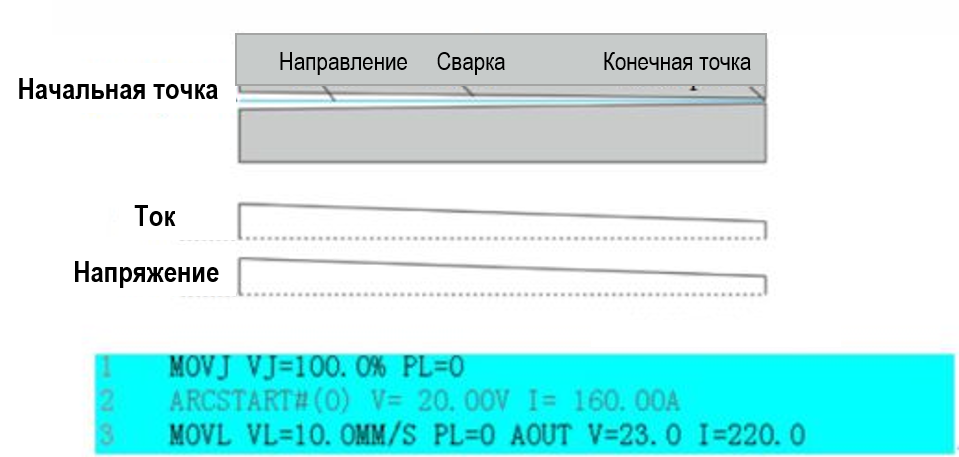
Payvandlash parametrlarini silliq tuzatish funktsiyasi
Payvandlash parametrlarini silliq tuzatish funktsiyasi murakkab mahsulotlarni payvandlash uchun ishlatilishi mumkin, bu erda parametrlarni to'g'ridan-to'g'ri payvandlash jarayonida silliq o'zgartirish talab etiladi. Payvand chokini bajarish paytida oqim va kuchlanishning belgilangan qiymatga silliq o'zgarishi ishlatilishi mumkin. Parametrlarni silliq sozlash boshlanishining kerakli nuqtasida oqim va kuchlanishning dastlabki parametrlarini o'rnatish va kerakli nuqtada yakuniy qiymatlarni o'rnatish kifoya. Parametrlarni o'zgartirish jarayoni chiziqli.
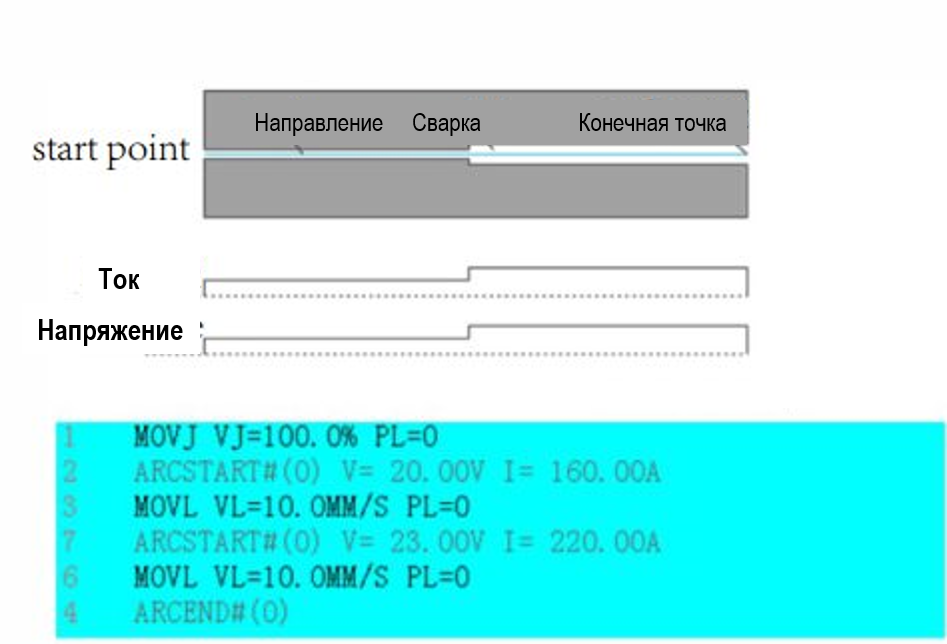
Payvandlash parametrlarini zudlik bilan tuzatish funktsiyasi
Payvandlash parametrlarini bir zumda tuzatish funktsiyasi murakkab mahsulotlarni payvandlash uchun ishlatilishi mumkin, bu erda to'g'ridan-to'g'ri payvandlash jarayonida oqim va kuchlanishning bir zumda o'zgarishi talab etiladi. Faqat kerakli nuqtada yangi payvandlash parametrlarini o'rnatish kerak va payvandlash jarayonida aynan shu joyda oqim va kuchlanishning bir zumda o'zgarishi sodir bo'ladi.
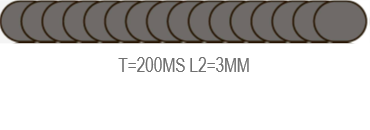
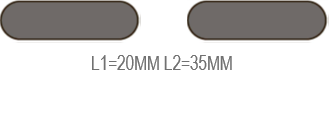
Skuamoz tikuv/intervallik tikuv
Skuamoz payvand funktsiyasi - bu nuqta payvandlash texnologiyasi. Funktsiya qo‘llanilishida engil, faqat qo‘llash vaqti va qadam o‘rnatiladi. Bunday tikishni faqat traektoriya, uzunligi va qadam bilan bajarish imkonini beradi.
Payvandlash yoyi oqimini kuzatish
Ushbu funktsiya kosmosdagi payvandlangan bo'g'inning pozitsion og'ishlarini qoplashga yordam beradi. Agar payvandlash bo'g'inida bo'shliq yoki kesish bo'lsa va payvandlash tebranish bilan amalga oshirilsa, bu funktsiya juda mos keladi. Qo'shimcha sensor yordamida robot payvandlash jarayonida oqimni nazorat qiladi. Traektoriya bo'ylab eng kichik va eng katta qiymatlarni o'rnatib, robot payvandlangan bo'g'inning kesish va chekka markazini aniqlaydi va qismning haqiqiy holatiga nisbatan dasturlashtirilgan harakat traektoriyasini tuzatadi.. Eslatma: ushbu funktsiyaning ishlashi uchun qo'shimcha CAW-V1 yoyini kuzatish sensori kerak.
Optik tikuvni kuzatish
Ushbu funktsiyaning ishlashi uchun payvandlash robot manipulyatori payvandlash tikuvini qo'shimcha optik kuzatuv sensori bilan jihozlangan. Ushbu sensor sizga payvandlangan bo'g'inlarni oldindan qidirish va to'g'ridan-to'g'ri payvandlash paytida traektoriyani onlayn sozlash imkonini beradi. Kuzatuv lazer nurini payvandlangan bo'g'inga proektsiyalash orqali amalga oshiriladi. Belgilangan parametrlarga (bo'shliq, kesish, ulanish turi) asoslanib, tizim tikuvning haqiqiy holatini aniqlaydi va payvandlash yo'lini to'g'rilaydi.
Ko'p missiyali payvandlash funktsiyasi
Ko'p missiyali payvandlash funktsiyasidan foydalanib, robotga faqat bir marta payvandlash yo'lini o'rgatish kerak, so'ngra ko'rsatmalardan foydalanib, kerakli miqdordagi o'tishlar uchun tezlik va payvandlash parametrlarini sozlang. Bu dasturlash vaqtini va murakkabligini ancha qisqartiradi.
Ruxsat etilgan nuqta kuzatuvi
Ruxsat etilgan nuqta optik kuzatuv funksiyasi uzun aylana yoki chiziqli choklarni payvandlash uchun mo'ljallangan. Ushbu funktsiyaning ishlashi uchun tashqi aks kerak. Payvandlash traektoriyasi bo'ylab harakatlanish pozitsionerning aylanishi yoki robotning chiziqli o'qi bo'ylab harakatlanishi tufayli amalga oshiriladi. Shu bilan birga, robotning o'zi deyarli harakatsiz qoladi va dasturlashtirilgandan haqiqiy payvandning siljishini qoplash uchun minimal harakatlar qiladi. Payvandlangan birikmaning holatini aniqlash optik kuzatuv sensori yordamida amalga oshiriladi.
Robotlar uchun payvandlash manbalari
MIG payvandlash uchun MEGMEET payvandlash manbalari qo'llaniladi:
- EHAVE CM350 (havo sovutgichi, 350А)
- EHAVE CM500 (suv sovutgichi, 500А)
- ARTSEN PLUS 350D (havo sovutgichi, 350А)
- ARTSEN PM400FR (havo sovutgichi, 350А)
- ARTSEN PM500FR (suv sovutgichi, 500А)
- ARTSEN PM400NR (havo sovutgichi, 350А)
- ARTSEN PM500NR (suv sovutgichi, 500А)
- ARTSEN PLUS 400QR (suv sovutgichi, 500А)
- ARTSEN PLUS 500QR (suv sovutgichi, 500А)
TIG payvandlash uchun BINGO payvandlash manbalari qo'llaniladi:
- WSM-400R (suv sovutgichi, 500А)
- WSME-315R (suv sovutgichi, 500А)
- WSME-500R (suv sovutgichi, 500А)
Robot yordamida payvandlash - afzalliklari
Robotik payvandlashning murosasiz sifati va kompaniyaning robototexnika, payvandlash texnologiyalari va uskunalari sohasidagi ishlanmalari robotli payvandlashni yangi bosqichga olib chiqqan va quyidagilarni ta'minlagan eng yangi texnologiyalarning paydo bo'lishiga olib keldi:

Yuqori sifat
- payvandlash tikuvlarining yuqori sifati va estetikasi;
- payvandlashning yuqori mahsuldorligi va tezligi;
- payvandlashning boshlang'ich nuqtasiga silliq yondashishni ta'minlash, buning natijasida payvandlash sifati ham yaxshilanadi;
- payvandlashning yuqori mahsuldorligi va tezligi;
- payvandlashning boshlang'ich nuqtasiga silliq yondashishni ta'minlash, buning natijasida payvandlash sifati ham yaxshilanadi;
Xarajatlarni qisqartirish
- Cho'kish zonasining deyarli to'liq yo'qligi sababli tikuv zonasi yaqinida tozalash uchun;
- payvand choklaridagi nuqsonlarni bartaraf etish uchun;
- diametri 1,2 mm bo'lgan 1,0 mm simli payvand choklari;
- payvand choklaridagi nuqsonlarni bartaraf etish uchun;
- diametri 1,2 mm bo'lgan 1,0 mm simli payvand choklari;
Qulaylik
- Yuqori xizmat ko'rsatish sizga robotning o'qlarini burnerni olib tashlamasdan moylash imkonini beradi;
- Tez va oson ishlatiladigan dizayn;
- Simlarni yuqori darajada etkazib berish imkoniyatlari;
- CAN interfeysi orqali boshqa komponentlar bilan tezkor aloqa;
- Displeydan eng qulay foydalanish.
- Tez va oson ishlatiladigan dizayn;
- Simlarni yuqori darajada etkazib berish imkoniyatlari;
- CAN interfeysi orqali boshqa komponentlar bilan tezkor aloqa;
- Displeydan eng qulay foydalanish.
Hali ham payvandlash robotlari bo'yicha savollaringiz bormi?
Agar sizda hali ham savollaringiz bo'lsa, siz sanoat robotlari, robot komplekslari, manipulyatorlar va pozitsionerlar bilan qiziqasiz yoki ishlab chiqarishni avtomatlashtirish bo'yicha savdo taklifini olishni istasangiz – iltimos, quyidagi lavhani to'ldiring.
Bizning menejerimiz 24 soat ichida siz bilan bog'lanishadi.
Toshkent, Mirobod, Oybek,
Said Barak ko'chasi, 16A
Said Barak ko'chasi, 16A
+998 947 207226
info@crp-robot.ru
info@crp-robot.ru
